
Вьющиеся растения отлично умеют держатся за тонкие предметы, такие как веревки. Новый роботизированный захват, созданный по их подобию, может найти применение при работе с небольшими хрупкими предметами.
Вьющиеся растения "работают" (держаться за предметы), благодаря чувствительным к прикосновению усикам, которые обвиваются вокруг всего, с чем соприкасаются. Новый захват, разработанный командой из Университета Джорджии, имеет аналогичный механизм.
«Мы пробовали разные варианты конструкций, но результаты нас не удовлетворили. Затем я вспомнил о бобах, которые выращивал в нашем саду несколько лет назад, - говорит ведущий исследователь, ассоциированный профессор Мейбл Фок. - Это растение может очень крепко держаться за другие растения или веревку. Я провел небольшое исследование вьющихся растений и подумал, что это хороший пример от природы для нас».
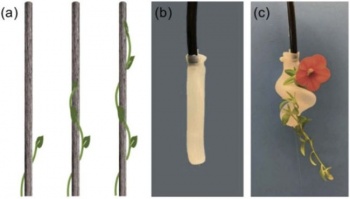
Получившийся прототип захвата, напечатанный на 3D-принтере, имеет цилиндрический эластичный корпус из силиконовой резины, внутри которого проходит эластичный оптоволоконный датчик, вокруг которого обвит пневматический канал. Когда оптоволоконный датчик обнаруживает, что захват находится в контакте с объектом, он дает сигнал на миниатюрный компрессор, который закачивает воздух в канал, в результате чего захват начинает закручиваться как штопор, при этом наматываясь объект.
Важно отметить, что датчик также может определять диаметр объекта и угол закручивания. Он соответствующим образом регулирует количество воздуха, нагнетаемого в пневматический канал, определяя, насколько плотно захват наматывается вокруг объекта - чем выше давление воздуха, тем круче изгиб. Как только задача захвата будет завершена, снижение давления заставит устройство выпрямиться и освободить предмет.
Вполне возможно, что эта технология найдет применение в задачах при работе с растениями, захвате хрупких стеклянных пробирок и даже при выполнении роботизированных хирургический операций.
Статья об исследовании была недавно опубликована в журнале Optics Express.

