
Биоинженеры напечатали микроракету с тремя соплами, которая за счет термофореза поставила новый рекорд в скорости передвижении среди микророботов — 2,8 миллиметра в секунду. С помощью фотоакустической микроскопии ученые смогли наблюдать движение микроракеты через модельный резиновый сосуд с кровью и ткани мышиного уха. Статья опубликована в журнале Light: Science & Applications.
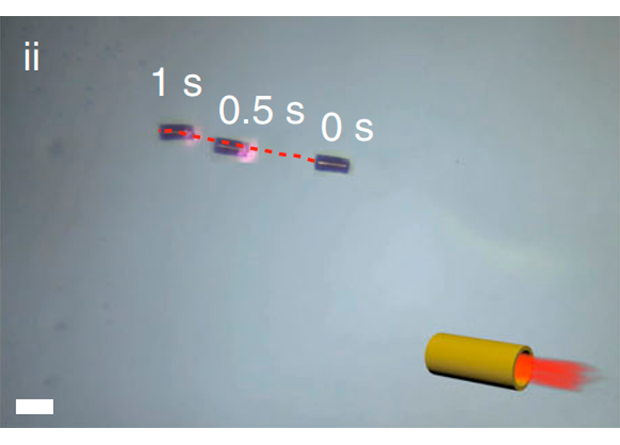
Перемещение микротрубки
Ученые уже какое-то время экспериментируют с микророботами для лечения in vivo. Наиболее удобный путь доставки таких роботов к органам — через кровеносные сосуды, так как кровеносная система проходит через весь человеческий организм. На сегодняшний момент микророботы используются для точечной доставки лекарств и лечения опухолей преимущественно в желудке, кишечном тракте и подкожной ткани. При разработке таких роботов ученые сталкиваются в первую очередь с неэффективностью движения и малой разрешающей способностью средств детектирования, которые не позволяли определять отдельного робота с размерами менее ста микрометров.
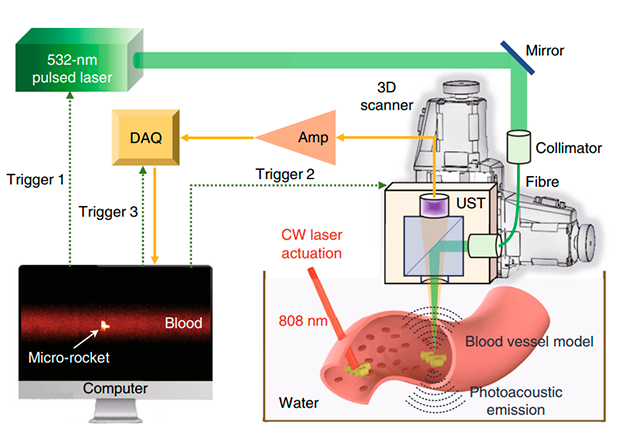
Схема управления и определения положения микроракеты
Кровь — вязкая и быстротекущая среда, что значительно осложняет работу микроробота внутри организма. Из существующих микророботов на различных движущих силах достаточной скорости достигли лишь микророботы на химическом движении, но токсичные реагенты не позволяют использовать это в кровеносных сосудах. Распространенные магнитные микророботы превосходны в безопасности использования и контроле управления, но малая скорость не позволяет использовать их даже в сосудах с самым медленным током крови. Более высокой скоростью среди неразрушающих и нетоксичных методов обладают микророботы, двигающиеся за счет света. Основной принцип работы таких микророботов заключен в асимметрии их фигуры, из-за которой при облучении светом разные части микроробота нагреваются по-разному и возникает явление термофореза — тело перемещается из горячей зоны в более холодную.
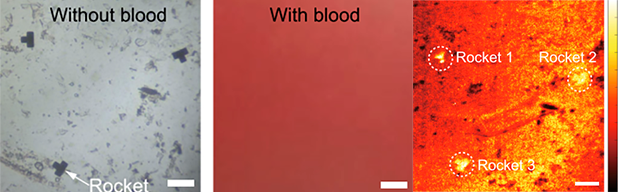
(Слева) Вид микроракет с помощью микроскопа без крови и с бычьей кровью, (справа) микроракеты заметны на фотоакустическом картировании под слоем крови Lidai Wang et al. / Light: Science & Applications, 2020
За движением отдельного микроробота в кровеносных сосудах необходимо следить с высокой точностью, чего не позволяют достичь современные методы (компьютерная и магнитно-резонансная томография, рентгеновское, флуоресцентное и ультразвуковое картирование). Но недавно ученые разработали метод фотоакустической томографии и успешно применили его в наблюдении за микрокапсулами, наполненными сферическими микроботами.

Движение микроракеты по резиновой модели сосуда с бычьей кровью Lidai Wang et al. / Light: Science & Applications, 2020
Ли Дай Ван (Lidai Wang) с коллегами из Городского университета Гонконга напечатал микроракету с тремя соплами для увеличения эффективности движения на основе света. Для проверки работы в естественных условиях ученые запустили микророботов в модельные резиновые сосуды, наполненные глицерином и бычьей кровью, а также в ухо анестезированной мыши. Такая микроракета может разогнаться до 2,8 миллиметров в секунду и вращаться со скоростью 138 градусов в секунду.
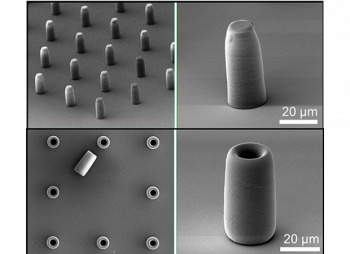
Ученые получили микрометровых роботов с помощью литографии из фоторезиста SU-8, затоговки затем покрывали слоем золота. Для определения местоположения микроракеты авторы использовали лазерное излучение с длиной волны в 532 нанометра, которое при попадании на микроракету возбуждает акустические сигналы, которые благодаря золоту значительно контрастируют с окружающей средой.
Передвижение микроракеты осуществляется за счет фототермального механизма: под пучком лазерного излучения в 808 нанометров слой золота генерирует тепло. В основании микроракеты больше золота, соответственно температура основания будет больше температуры вершины,из-за чего и возникает эффект термофореза.
Чтобы обосновать выбор формы, ученые сделали еще два микроробота (микростержень и микротрубку) и устроили между ними соревнования по скорости. Микротрубка двигалась быстрее микростержня из-за наличия сопла, которое добавляет к термофорезному эффекту значительный тепловой поток внутри полости. Микроракета, таким образом, оказалась быстрее микротрубки за счет трех сопел.
Авторы проследили за перемещением микророботов в 50-процентном растворе глицерина под излучением 808-нанометрового лазера — за одну секунду микроракета преодолела 777,4 микрометра, микростержень — примерно 100 микрометров, микротрубка — 260 микрометров. Биоинженеры выбрали 50-процентный раствор глицерина из-за его вязкости (4,21 микропаскаль на секунду), близкой к вязкости человеческой крови (3-4 микропаскаль на секунду). При увеличении мощности лазера с 1 ватта до 1,5 ватт средняя скорость микроробота увеличилась и достигла отметки в 2,8 миллиметра в секунду — за одну секунду проходила расстояние в 62 раза больше длины микроракеты.
Для управления ракетой ученые наводили лазер на одну из ее боковых трубок, и из-за асимметрии микроробот поворачивался в обратную сторону. Таким образом микроракета за 1,1 секунды повернулась на 152 градуса. Если же наводить лазер на все основание, то микроракета будет продолжать движение прямо. Такое управление позволит совершать точечное биомедицинское лечение.

