Исследователи из Университета штата Северная Каролина создали гибкие трехмерные сетчатые структуры, управляемые магнитными полями. Они могут захватывать предметы, переносить капли воды, а также расширяться и сжиматься, плавая на воде.
Как создавались структуры?
Данное исследование демонстрирует возможности в новой области, объединяющей в себе 3D-печать и мягкую робототехнику. При разработке структур исследователи сначала продумали чернила для 3D-печати. Они изготовлены из силиконовых микрошариков, связанных жидким силиконом. По консистенции они напоминают зубную пасту.
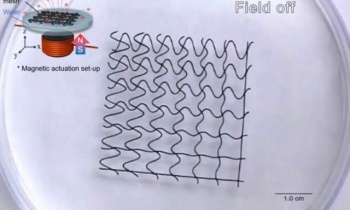
Уникальные объекты напечатаны на 3D-принтере, они управляются посредством магнитных полей. Их создали в виде гибких сетчатых структур, которые могут захватывать объекты, переносить капли воды, расширяться и сжиматься.
Вначале исследователи 3D-напечатали из чернил, напоминающих «гомокомпозитную тиксотропную пасту» уникальную сетку. Затем они поддали структуры термической обработке. В результате получились ультрамягкие, гибкие силиконовые конструкции, которыми можно управлять с помощью магнитного поля.
Сферы применения
Добавление в структуры частиц карбонила железа, которые характеризуются высокой намагниченностью, позволяет получить сильный отклик на градиенты магнитного поля. Напечатанные структуры, которые получились в результате, могут применяться в создании мягкой робототехники. Она будет способна имитировать существ, живущих на поверхности воды. Также данные объекты могут использоваться для имитации живых тканей в организме или с целью создания каркасов тканей для клеточных культур.
Исследователям NCSU удалось показать, как можно сконструировать реконфигурируемую сетку, которая способна захватывать шарик из алюминиевой фольги. Успех проекта во многом обязан применению аддитивной технологии.
Структуры также способны расширяться и сжиматься во всех направлениях. С помощью 3D-печати ученые могут контролировать форму до и после воздействия магнитного поля. На данный момент, это раннее подтверждение концепции мягкого роботизированного привода.

